近日,广东工业大学自动化学院王银河教授团队研究成果“链路动态辅助作用下复杂动态网络的节点跟踪控制”(Tracking control of the nodes for the complex dynamical network with the auxiliary links dynamics,https://doi.org/10.1016/j.ins.2023.01.124)在国际著名TOP期刊Information Sciences刊发,论文第一作者为自动化学院博士生高沛涛,导师为王银河教授,广东工业大学为论文第一单位。

团队主要从事有关非线性系统控制分析与智能自适应控制设计、复杂动态网络同步与跟踪控制器等方面的控制设计与仿真研究。
文章首先提出一个复杂动态网络可以视为由节点子系统和链路子系统构成,且这两个子系统是相互耦合的;既节点的动态行为会影响链路子系统的动态行为,反之亦然。在这篇文章中,两个向量微分方程被分别用于描述节点子系统和链路子系统的动态变化,其中,节点子系统的动态变化用更加符合实际工程背景具有二阶导数模型的向量微分方程描述。相比较于现有的文献,主要的优势在于链路的动态被用于协助合成节点子系统的跟踪控制器。最后的结果也表示当链路子系统的状态渐近跟踪上合成的辅助跟踪目标时,节点子系统的状态也是渐近跟踪上给定的参考信号。通过观察复杂动态网络最终拓扑,可知,当节点子系统跟踪上给定的跟踪目标时,节点之间的链路关系是动态变化的,也就是说节点不是完全孤立的。最后通过多个两连杆机械臂验证了本文所提控制方法的有效性。

图一 两连杆机械臂
为了验证本文里面控制方法的优势,分别与文献[39]. Intelligent Automation Soft Computing, 2009, 15(2): 211-222, [40].Neurocomputing, 2014, 140: 8-18, [41]. IEEE/CAA Journal of Automatica Sinica, 2021, 9(1): 47-63 中的控制方法做对比,跟踪误差范数的对比结果如下图二所示。
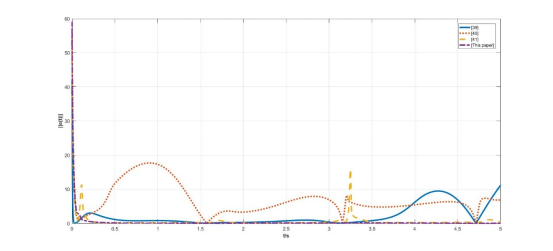
图二 分别在文献[39-41]和本文控制器作用下两连杆机器人的姿态角跟踪误差范数的状态相应曲线图
由图二可以看出在本文控制器的作用下,控制方法明显比文献[39-41]中的控制方法更具有优势。此外,论文得到了汕头大学李昇平教授和广东工业大学张丽丽副教授、彭义老师等在理论模拟和数值仿真方面提供的支持。相关研究得到国家自然科学基金 (61673120),汕头大学智能制造技术教育部重点实验室开放基金项目(202109242),广东省基础与应用基础研究基金(2020A1515010809), 广东省高校团队项目(2015KCXTD018)的支持。近年来,王银河教授团队着眼于复杂动态网络的同步与跟踪控制的相关研究,系列成果发表于 International Journal of Robust and Nonlinear Control,32(16), 2022, 32(16): 8754-8766. ISA transactions, 2023, 132: 338-345. Neurocomputing, 2023, 515: 59-67.Information Sciences, 2023, 628: 350-359.
